* Nama : Kaida Fitriani
* NIM : 11.11.2530
* Kelas : Ti 11 C
================================================================================================================================
Pengertian Mikrokontroler dan Mikroprosesor
A. MIKROPROSESOR
Mikroprosesor adalah sebuah chip (IC=Integrated
Circuits) yang di dalamnya terkandung rangkaian ALU (Arithmetic-Logic Unit),
rangkaian CU (Control Unit) dan register-register. Mikroprosesor disebut juga
dengan CPU (Central Processing Unit). yang digunakan sebagai otak/pengolah
utama dalam sebuah sistem komputer. Mengatur kerja sistem berdasarkan urutan
program yang telah ditetapkan. Ia mengatur keluar masuknya data dari/ke antar
bagian dalam sistem. Ia juga mengatur aktivitas keluar/masuk data dari/ke
perangat diluar sistem.
ALU: menyediakan
fungsi pengolahan.
CU: mengontrol fungsi
prosesor.
Register: tempat
penyimpanan sementara dalam mikroprosesor
1. JENIS-JENIS
MIKROPROSESOR
Berdasarkan pada
banyaknya bit yang dikerjakan oleh ALU(Arithmatic Logic Unit), CPU dibedakan
menjadi 4 jenis :
a. Bit Slices Prosesor
: Perancangan CPU
dengan menambahkan jumlah irisan bit(slices) untuk aplikasi-aplikasi tertentu.
CPU jenis ini dapat dikatakan dengan CPU custom.
b. General Purpose CPU
: CPU serbaguna atau
mikrokomputer dengan semua kemampuan dari kini komputer terdahulu.
c. I/O Prosessor : Prosesor khusus yang berfungsi
menangani input/output request membantu prosesor utama.
d. Dedicated/Embedded
Controller : Membuat mesin
menjadi smart, seperti : mesin cuci, microwave, oven, mesin jahit, sistem
pengapian otomotif. Prosesor jenis ini lebih dikenal dengan mikrokontroler.
2. KOMPONEN SISTEM
MIKROPROSESOR
Sistem mikroprosesor
tersusun dari empat komponen, yaitu
- Mikroprosesor itu sendiri
- Random Access Memory(RAM)
- Read Only memory(ROM)
- Port Input/Output(PIO)
Dalam bekerja,
keempat komponen tersebut saling berkomunikasi/mentransfer data.Media transfer
datanya berupa sekelompok jalur-jalut penghubung yang disebut bus.Ada tiga
jenis bus dalam sistem mikroprosesor, yaitu bus alamat, bus data, dan bus
kontrol.
3. KARAKTERISTIK
MIKROPROSESOR
Berikut adalah
karakteristik penting dari mikroprosesor :
- Ukuran bus data internal (internal data bus size): Jumlah saluran yang terdapat dalam mikroprosesor yang menyatakan jumlah bit yang dapat ditransfer antar komponen di dalam mikroprosesor.
- Ukuran bus data eksternal (external data bus size): Jumlah saluran yang digunakan untuk transfer data antar komponen antara mikroprosesor dan komponen-komponen di luar mikroprosesor.
- Ukuran alamat memori (memory address size): Jumlah alamat memori yang dapat dialamati oleh mikroprosesor secara langsung.
- Kecepatan clock (clock speed): Rate atau kecepatan clock untuk menuntun kerja mikroprosesor.
- Fitur-fitur spesial (special features): Fitur khusus untuk mendukung aplikasi tertentu seperti fasilitas pemrosesan floating point, multimedia dan sebagainya.
Cara kerja sebuah
Mikroprosesor diarahkan oleh suatu program dalam kode-kode bahasa mesin yang
telah dimasukkan terlebih dahulu ke dalam sebuah memori. Di dalam Mikroprosesor
minimal terdiri dari rangkaian digital, register, pengolah logika aritmatika,
rangkaian sekuensial.
4. FUNGSI MIKROPROSESOR
Fungsi utama
Mikroprosesor adalah sebagai unit yang mengendalikan seluruh kerja sistem
mikroprosesor. Beberapa fungsi lain dari mikroprosesor, antara lain :
- Mengambil instruksi dan data dari memori.
- Memindah data dari dan ke memori.
- Mengirim sinyal kendali dan melayani sinyal interupsi.
- Menyediakan pewaktuan untuk siklus kerja sistem mikroprosesor.
- Mengerjakan fungsi – fungsi operasi logika dan aritmetika.
B. MIKROKONTROLER
Mikrokontroler adalah sebuah chip yang didalamnya
terdapat mikroprosesor yang telah dikombinasikan dengan I/O dan memori
(ROM/RAM). Penggunaan mikrokontroler lebih menguntungkan dibandingkan
penggunaan mikroprosesor. Hal ini dikarenakan dengan mikrokontroler
tidak perlu lagi penambahan memori dan I/O eksternal selama memori dan I/O internal
masih bisa mencukupi. Selain itu proses produksinya secara masal, sehingga
harganya menjadi lebih murah dibandingkan mikroprosesor.
1. JENIS- JENIS MIKROKONTROLER
Secara teknis, hanya ada 2 macam
mikrokontroller. Pembagian ini didasarkan pada kompleksitas instruksi-instruksi
yang dapat diterapkan pada mikrokontroler tersebut. Pembagian itu yaitu RISC
dan CISC.
a. RISC merupakan kependekan dari Reduced
Instruction Set Computer. Instruksi yang dimiliki terbatas, tetapi memiliki
fasilitas yang lebih banyak.
b. Sebaliknya, CISC kependekan dari Complex
Instruction Set Computer. Instruksi bisa dikatakan lebih lengkap tapi dengan
fasilitas secukupnya.
Masing-masing mempunyai keturunan atau
keluarga sendiri-sendiri. jenis-jenis mikrokonktroler yang telah umum
digunakan.
1. Keluarga MCS51
Mikrokonktroler ini termasuk dalam
keluarga mikrokonktroler CISC. Sebagian besar instruksinya dieksekusi dalam 12 siklus
clock.
Mikrokontroler ini berdasarkan
arsitektur Harvard dan meskipun awalnya dirancang untuk aplikasi mikrokontroler
chip tunggal, sebuah mode perluasan telah mengizinkan sebuah ROM luar 64KB dan
RAM luar 64KB diberikan alamat dengan cara jalur pemilihan chip yang terpisah
untuk akses program dan memori data.
Salah satu kemampuan dari
mikrokontroler 8051 adalah pemasukan sebuah mesin pemroses boolean yang
mengijikan operasi logika boolean tingkatan-bit dapat dilakukan secara langsung
dan secara efisien dalam register internal dan RAM. Karena itulah MCS51
digunakan dalam rancangan awal PLC (programmable Logic Control).
2. AVR
Mikrokonktroler Alv and Vegard’s Risc
processor atau sering disingkat AVR merupakan mikrokonktroler RISC 8 bit.
Karena RISC inilah sebagian besar kode instruksinya dikemas dalam satu siklus
clock. AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang
elektronika dan instrumentasi.
Secara umum, AVR dapat dikelompokkan
dalam 4 kelas. Pada dasarnya yang membedakan masing-masing kelas adalah memori,
peripheral dan fungsinya. Keempat kelas tersebut adalah keluarga ATTiny,
keluarga AT90Sxx, keluarga ATMega dan AT86RFxx.
3. PIC
Pada awalnya, PIC merupakan kependekan
dari Programmable Interface Controller. Tetapi pada perkembangannya
berubah menjadi Programmable Intelligent Computer.
PIC termasuk keluarga mikrokonktroler
berarsitektur Harvard yang dibuat oleh Microchip Technology. Awalnya
dikembangkan oleh Divisi Mikroelektronik General Instruments dengan nama PIC1640.
Sekarang Microhip telah mengumumkan pembuatan PIC-nya yang keenam
PIC cukup popular digunakan oleh para
developer dan para penghobi ngoprek karena biayanya yang rendah, ktersediaan
dan penggunaan yang luas, database aplikasi yang besar, serta pemrograman (dan
pemrograman ulang) melalui hubungan serial pada komputer.
2. MEMORY MAP
Mikrokontroler AVR memiliki peta
memori yang terpisah antara memori data dan program.
- Memory data : berupa memory volatile (RAM) yang terbagi atas :
-
32 register General purpose (alamat 0x00 sampai
0x1F)
-
64
register I/O (alamat 0x20 sampai 0x5F) à register yang digunakan untuk mengatur fungsi
beberapa peripheral mikrokontroler
-
SRAM
internal (alamat 0x60 sampai 0x25F)
- Memori program : berupa flash memory (non volatile) yang bisa dihapus tulis. Memory program tersusun atas word (2 byte) karena setiap instruksi memiliki lebar 16 bit atau 32 bit. ATmega8535 memiliki 4KWord flash dengan alamat 0x000 sampai 0xFFF. Flash tersebut dialamati oleh program counter (PC)
3. BAHASA ASSEMBLY
Tersusun dari
instruksi-instruksi berupa kata-kata singkat dan dieksekusi perbaris. Contoh
program dalam bahasa assembly:
;program menghidup-matikan LED di port B
.NOLIST
.INCLUDE
"C:\appnotes\m8535def.inc" ;menggunakan file include atmega8535
;berisi definisi2 periferal atmega8535
.LIST
.DEF mp = R16 ;melakukan rename terhadap r16 menjadi mp
;program utama
main:
ldi mp,0b11111111
; The command LDI (LoaD Immediate) loads an 8-bit value into the
register
; mp. This command is only valid for the registers R16 to R31.
out DDRB,mp
; The command OUT writes register values (here: mp or R16) to a
port
; (here DDRB).
loop:
ldi mp,0x00 ;hidupkan LED
out PORTB,mp
rcall delay ;panggil subrutin delay
ldi mp,0xFF ;matikan LED
out PORTB,mp
rcall delay ;panggil subrutin delay
rjmp loop
delay: ;definisi
subrutin delay
ldi R17,#0xFF ;subrutin tunda menggunakan pengurangan
register berulang2
del1:
ldi R18,#0xFF
del2:
dec R18 ;r18=r18-1
brne del2 ;jika
belum 0, lompat ke del2
dec R17 ;r17=r17-1
brne del1
ret ;subrutin selalu diakhiri ret
- central processing unit - mulai dari prosesor 4-bit yang sederhana hingga prosesor kinerja tinggi 64-bit.
- input/output antarmuka jaringan seperti port serial (UART)
- antarmuka komunikasi serial lain seperti I²C, Serial Peripheral Interface and Controller Area Network untuk sambungan sistem
- periferal seperti timer dan watchdog
- RAM untuk penyimpanan data
- ROM, EPROM, EEPROM atau Flash memory untuk menyimpan program komputer
- pembangkit clock - biasanya berupa resonator rangkaian RC
- pengubah analog-ke-digital
- v Contoh Aplikasi Mikrokontroler dan Programnya
Tahap pertama adalah merancang perangkat keras (hardware), yang meliputi rangkaian – rangkaian
elektronika dan alat putar keramik. Tahap kedua adalah perancangan algoritma, listing program pada software Code Vision AVR dan penanaman listing program pada mikrokontroler AVR ATMega16 dengan menggunakan software ISP Programmer.
Perancangan Perangkat Keras
Seluruh perangkat atau komponen yang digunakan dalam perancangan pengaturan
kecepatan pada alat putar keramik menggunakan motor AC ini, tersusun seperti pada
blok diagram di bawah ini. Gambar Blok Diagram Pengaturan Kecepatan Motor AC
Gambar Blok Diagram Pengaturan Kecepatan Motor AC
Pada Alat Putar Keramik.
Blok diagram diatas, secara garis besar dapat dijelaskan sebagai berikut.
1. Keypad digunakan sebagai alat untuk memasukkan nilai kecepatan putaran yang diinginkan (nilai setpoint). Keypad dihubungkan ke PORTB mikrokontroler AVR ATMega16. Nilai dari keypad tersebut mewakili nilai kecepatan putaran dengan satuan rotation per minute (rpm). Nilai yang diijinkan sebesar antara 60–150rpm.
2. Nilai setpoint akan diolah sedemikian rupa dengan menggunakan suatu program yang ditanamkan pada mikrokontroler AVR ATMega16, sehingga nilai tersebut dapat ditampilkan pada LCD dan digunakan pada register OCR1A yang berfungsi untuk membangkitkan sinyal PWM.
3. Sinyal PWM dibangkitkan setelah nilai pada register OCR1A terisi (OCR1A ≠ 0) dan sinyal PWM dikeluarkan melalui Pin 19 PORTD.5 (OC1A) pada mikrokontroler AVR ATMega16.
4. Sinyal PWM tersebut akan memicu TRIAC Optoisilator pada rangkaian driver motor AC. Rangkaian zero crossing detector telah tersedia dalam satu paket (Onpackage) IC TRIAC Optoisolators MOC3041, sehingga titik acuan sinyal PWM pada saat mengatur sinyal sinusoidal (tegangan AC) dimulai pada saat perpotongan titik nol (zero crossing). Keluaran dari TRIAC Optoisolators tersebut (pin 6) akan memicu gate TRIAC (Q4004LT) sehingga memberikan arus pada motor AC.
5. Motor AC akan menggerakkan alat putar keramik dan alat putar tersebut akan dideteksi putarannya setiap 1 detik (Timer 0) oleh sensor putaran (phototransistor). Pendeteksian putaran alat putar ini bertujuan untuk mengetahui apakah kecepatan putaran alat putar sama dengan nilai setpoint yang diberikan. Kecepatan alat putar akan dipengaruhi oleh beban (tanah liat) yang bervariasi. Kecepatan akan berkurang apabila beban semakin berat, oleh karena itu sensor pun berfungsi untuk mengetahui kecepatan alat putar terhadap beban.
fitur interupsi eksternal mikrokontroler akan mengetahui setiap kali sensor memberikan respon (logika 0).
6. Program pengaturan alat putar pada mikrokontroler ATMega16 akan mengatur dan membandingkan antara kecepatan setpoint dan kecepatan yang sesungguhnya (real time). Jika sensor mendeteksi kecepatan alat putar setpoint-nya, maka program akan mengatur (mengurangi) nilai pada OCR1A dan jika sensor mendeteksi kecepatan alat putar lebih lambat dari pada kecepatan setpointnya, maka program akan mengatur (menambahi) nilai pada register OCR1A.Perancangan Rangkaian Sistem Minimum AVR ATMega16Mikrokontroler AVR ATMega16 dapat dioperasikan dengan cara menambahkan beberapa komponen elektronika yang berfungsi sebagai komponen pendukungnya.Mikrokontroler dan komponen komponen pendukung tersebut tergabung dalam satu rangkaian yang disebut sebagai rangkaian sistem minimum.
Mikrokontroler AVR ATMega16 dapat dioperasikan dengan cara menambahkan beberapa komponen elektronika yang berfungsi sebagai komponen pendukungnya. Gambar Rangkaian Sistem Minimum AVR ATMega16Kristal yang digunakan pada rangkaian sistem minimum di atas, mengunakan frekuensi 4 MHz. Kristal tersebut digunakan untuk pembangkit clock (osilator), dimana setiap 1 intruksi/perintah dalam program dieksekusi dalam 1 siklus clock. Pin RESET dihubungkan dengan rangkaian kombinasi RC dan push button, yang bertujuan agar mikrokontroler dapat di-reset. Fungsi dari port - port lainnya adalah sebagai berikut.
Gambar Rangkaian Sistem Minimum AVR ATMega16Kristal yang digunakan pada rangkaian sistem minimum di atas, mengunakan frekuensi 4 MHz. Kristal tersebut digunakan untuk pembangkit clock (osilator), dimana setiap 1 intruksi/perintah dalam program dieksekusi dalam 1 siklus clock. Pin RESET dihubungkan dengan rangkaian kombinasi RC dan push button, yang bertujuan agar mikrokontroler dapat di-reset. Fungsi dari port - port lainnya adalah sebagai berikut.
1. PORTA, digunakan sebagai pin masukkan untuk Keypad 3X4
2. PORTB, digunakan sebagai pin keluaran untuk LCD
3. PORTD.0 dan PORTD.1, digunakan sebagai pin masukan untuk tombol START
dan tombol STOP
4. PORTD.3, digunakan sebagai pin masukkan untuk sensor putaran (Ext. Interrupt)
5. PORTD.5 dan PORTD.6, digunakan sebagai pin keluaran untuk sinyal PWM.Perancangan Rangkaian Downloader
Rangkaian downloader merupakan rangkaian penghubung antara komputer dan mikrokontroler yang berfungsi untuk memasukan listing program (berupa bit – bit logika) ke dalam mikrokontroler. Listing program yang dikirim oleh software dari komputer ke dalam mikrokontroler biasanya berbentuk file *.hex (heksadesimal). Pada umumnya rangkaian downloader terdiri dari kabel penghubung jenis DB25 atau jenis
DB9. Sinkronisasi tegangan antara tegangan dari komputer dan tegangan mikrokontroler menggunakan sebuah buffer. Rangkaian downloader ditunjukkan seperti gambar di bawah ini : Gambar Rangkaian downloader DB 25
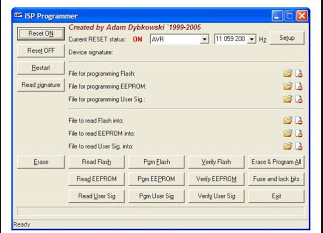
Gambar Rangkaian downloader DB 25 Gambar. Rangkaian downloader mikrokontrolerRangkaian di atas menggunakan port DB 25 sebagai alat penghubung antara komputer dan alat downloader, sedangkan IC 74HCT244 digunakan sebagai buffer. Software yang digunakan untuk mendownload program
Gambar. Rangkaian downloader mikrokontrolerRangkaian di atas menggunakan port DB 25 sebagai alat penghubung antara komputer dan alat downloader, sedangkan IC 74HCT244 digunakan sebagai buffer. Software yang digunakan untuk mendownload program
(file: *.hex) ke dalam mikrokontroler ini adalahISP Programmer (Adam Dybkowsky). Gambar.Tampilan Software ISP Programmer (Adam Dybkowsky)
Gambar.Tampilan Software ISP Programmer (Adam Dybkowsky)




----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Menampilkan 4 Digit Terakhir Dari NIM Pada Top View Simulator
Kini Saya kembali memposting sebuah materi perkuliahan Mikroprosessor tentang menampilkan angka pada Top View Simulator, adapun angkanya berupa 4 digit terakhir NIM saya yaitu 2579 ( NIM Lengkap 11.11.2579 ). Langsung aja deh,,,Langkah-langkahnya :
- Terlebih dahulu menginstal Software M-IDE dan Top View Simulator pada PC atau Laptop Anda.
- Kemudian Buka M-IDE, Klik icon New dan ketik program seperti di bawah ini :
$mod51
org 0H
start:mov p0,#1011011b
mov p1,#00000000b
mov p2,#00000000b
mov p3,#00000000b
call delay
mov p0,#1011011b
mov p1,#1101101b
mov p2,#00000000b
mov p3,#00000000b
call delay
mov p0,#1011011b
mov p1,#1101101b
mov p2,#0000111b
mov p3,#00000000b
call delay
mov p0,#1011011b
mov p1,#1101101b
mov p2,#0000111b
mov p3,#1101111b
call delay
mov p0,#0000000b
mov p1,#0000000b
mov p2,#0000000b
mov p3,#0000000b
call delay
Sjmp start
delay:mov R1,#020
delay1:mov R2,#255
delay2:mov R3,#253
delay3:djnz R3,delay3
djnz R2,delay2
djnz R1,delay1
Ret
End - Lalu Simpan dengan ekstensi .asm dan sesudah tersimpan selanjutnya tekan F9 / Build ( membuat file tersebut berganti ekstensi menjadi .hex ).
- Buka Top View Simulator, pada pilihan select device pilihlah yang AT89C52 dan operating frequency diisi 12MHz, Klik Ok.
- Pilih menu File - Eksternal Modules Setting - LED, kemudian atur seperti gambar di bawah ini :

Kemudian Atur Selection Of Port Lines And Number Of Digits sebagai berikut :



- Langkah berikutnya yaitu meload file yang tadi dibuat pada M-IDE yang berekstensi .hex caranya pilih File - Load Program - Pilih File yang ekstensinya .hex tadi.
- Kemudian Klik Menu View - Eksternal Modules - LED ( Untuk Melihat Hasilnya )
- Klik menu Run - Go ( Untuk Menjalankan Program ), dan hasilnya seperti gambar di bawah ini :

Proses tersebut terus berulang dari pertama sampai keenam - Program Sukses Dijalankan. Selamat!
---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
PERKEMBANGAN MIKROPROSESOR
Pengertian Mikroprosesor

Kata mikroprosesor dalam pengertian yang lebih luas berarti hanya sebuah CPU. Untuk membentuk sebuah board mikroprosesor yang lengkap blok-blok fungsional seperti memori, dan peripheral lainnya harus dihubungkan secara eksternal ke sebuah chip mikroprosesor. Sistem yang dibangun dengan cara ini disebut sebagai “Single-Board Microcomputer”. Contoh mikroprosesor adalah 8085, 8086 dan 80486.
Salah satu kelas penting lain dari mikroprosesor adalah ‘Bit-Slice Processor’. Istilah bit-slice prosesor berarti bahwa prosesor dapat diinterkoneksikan kedalam bentuk potongan-potongan prosesor yang lebar wordnya dapat ditentukan. Bit-slice prosesor terdiri dari 4 atau 8 bit ALU, register, dan jalur kendali. Jalur kendali terkoneksi pada setiap prosesor-prosesor dan semua prosesor tersebut dapat melakukan operasi yang sama.
Contoh bit-slice prosesor adalah AMD seri 2900. Desain bit-slice prosesor memilki beberapa keuntungan. Keuntungan yang pertama adalah ALU dapat digabungkan untuk membentuk komputer yang bisa mengelola data yang cukup besar dalam satu waktu.
Keuntungan desain bit-slice prosesor lainnya adalah dapat menggunakan teknologi chip bipolar yang sangat cepat. Lebih jauh lagi, desain bit-slicememungkinkan penggunanya membuat set intruksi sendiri untuk aplikasi-aplikasi yang mereka ciptakan.
Mikroprosesor pertama adalah intel 4004 yang dikenalkan tahun 1971, tetapi kegunaan mikroprosesor ini masih sangat terbatas, hanya dapat digunakan untuk operasi penambahan dan pengurangan. Mikroprosesor pertama yang digunakan untuk komputer di rumah adalah intel 8080, merupakan komputer 8 bit dalam satu chip yang diperkenalkan pada tahun 1974. Tahun 1979 diperkenalkan mikroprosesor baru yaitu 8088.
Setiap komputer yang kita gunakan didalamnya pasti terdapat mikroprosesor. Mikroprosesor, dikenal juga dengan sebutan Central Processing Unit (CPU) artinya unit pengolahan pusat. CPU adalah pusat dari proses perhitungan dan pengolahan data yang terbuat dari sebuah lempengan yang disebut “chip”. Chip sering disebut juga dengan “Integrated Circuit (IC)”, bentuknya kecil, terbuat dari lempengan silikon dan bisa terdiri dari 10 juta transistor.
Mikroprosesor pertama adalah intel 4004 yang dikenalkan tahun 1971, tetapi kegunaan mikroprosesor ini masih sangat terbatas, hanya dapat digunakan untuk operasi penambahan dan pengurangan. Mikroprosesor pertama yang digunakan untuk komputer di rumah adalah intel 8080, merupakan komputer 8 bit dalam satu chip yang diperkenalkan pada tahun 1974. Tahun 1979 diperkenalkan mikroprosesor baru yaitu 8088.
Mikroprosesor 8088 mengalami perkembangan menjadi 80286, berkembang lagi menjadi 80486, kemudian menjadi Pentium, dari Pentium I sampai dengan sekarang, Pentium IV. Untuk lebih lengkapnya, bisa melihat gambar dan tabel di bawah ini :

Sumber : http://www.intel.com
Keterangan Tabel :
Transistor berbentuk seperti tabung yang sangat kecil, terdapat pada Chip.
Micron adalah ukuran dalam Micron (10 pangkat -6), merupakan kabel terkecil dalam Chip
Clock Speed = kecepatan maksimal sebuah prosesor
Data width = lebar dari Arithmatic Logic Unit (ALU) / Unit pengelola aritmatika, untuk proses pengurangan, pembagian, perkalian dan sebagainya.
MIPS = Millions of Instructions Per Second / Jutaan perintah per detik.
Kata mikroprosesor dalam pengertian yang lebih luas berarti hanya sebuah CPU. Untuk membentuk sebuah board mikroprosesor yang lengkap blok-blok fungsional seperti memori, dan peripheral lainnya harus dihubungkan secara eksternal ke sebuah chip mikroprosesor. Sistem yang dibangun dengan cara ini disebut sebagai “Single-Board Microcomputer”. Contoh mikroprosesor adalah 8085, 8086 dan 80486.
Salah satu kelas penting lain dari mikroprosesor adalah ‘Bit-Slice Processor’. Istilah bit-slice prosesor berarti bahwa prosesor dapat diinterkoneksikan kedalam bentuk potongan-potongan prosesor yang lebar wordnya dapat ditentukan. Bit-slice prosesor terdiri dari 4 atau 8 bit ALU, register, dan jalur kendali. Jalur kendali terkoneksi pada setiap prosesor-prosesor dan semua prosesor tersebut dapat melakukan operasi yang sama.
Contoh bit-slice prosesor adalah AMD seri 2900. Desain bit-slice prosesor memilki beberapa keuntungan. Keuntungan yang pertama adalah ALU dapat digabungkan untuk membentuk komputer yang bisa mengelola data yang cukup besar dalam satu waktu.
Keuntungan desain bit-slice prosesor lainnya adalah dapat menggunakan teknologi chip bipolar yang sangat cepat. Lebih jauh lagi, desain bit-slicememungkinkan penggunanya membuat set intruksi sendiri untuk aplikasi-aplikasi yang mereka ciptakan.
Mikroprosesor pertama adalah intel 4004 yang dikenalkan tahun 1971, tetapi kegunaan mikroprosesor ini masih sangat terbatas, hanya dapat digunakan untuk operasi penambahan dan pengurangan. Mikroprosesor pertama yang digunakan untuk komputer di rumah adalah intel 8080, merupakan komputer 8 bit dalam satu chip yang diperkenalkan pada tahun 1974. Tahun 1979 diperkenalkan mikroprosesor baru yaitu 8088.
Setiap komputer yang kita gunakan didalamnya pasti terdapat mikroprosesor. Mikroprosesor, dikenal juga dengan sebutan Central Processing Unit (CPU) artinya unit pengolahan pusat. CPU adalah pusat dari proses perhitungan dan pengolahan data yang terbuat dari sebuah lempengan yang disebut “chip”. Chip sering disebut juga dengan “Integrated Circuit (IC)”, bentuknya kecil, terbuat dari lempengan silikon dan bisa terdiri dari 10 juta transistor.
Mikroprosesor pertama adalah intel 4004 yang dikenalkan tahun 1971, tetapi kegunaan mikroprosesor ini masih sangat terbatas, hanya dapat digunakan untuk operasi penambahan dan pengurangan. Mikroprosesor pertama yang digunakan untuk komputer di rumah adalah intel 8080, merupakan komputer 8 bit dalam satu chip yang diperkenalkan pada tahun 1974. Tahun 1979 diperkenalkan mikroprosesor baru yaitu 8088.
Mikroprosesor 8088 mengalami perkembangan menjadi 80286, berkembang lagi menjadi 80486, kemudian menjadi Pentium, dari Pentium I sampai dengan sekarang, Pentium IV. Untuk lebih lengkapnya, bisa melihat gambar dan tabel di bawah ini :
Sumber : http://www.intel.com
Keterangan Tabel :
Transistor berbentuk seperti tabung yang sangat kecil, terdapat pada Chip.
Micron adalah ukuran dalam Micron (10 pangkat -6), merupakan kabel terkecil dalam Chip
Clock Speed = kecepatan maksimal sebuah prosesor
Data width = lebar dari Arithmatic Logic Unit (ALU) / Unit pengelola aritmatika, untuk proses pengurangan, pembagian, perkalian dan sebagainya.
MIPS = Millions of Instructions Per Second / Jutaan perintah per detik.
Sejarah Perkembangan Mikroprocessor :
- 1971: 4004 Microprocessor
Pada tahun 1971 munculah microprocessor pertama Intel , microprocessor 4004 ini
digunakan pada mesin kalkulator Busicom. Dengan penemuan ini maka terbukalah
jalan untuk memasukkan kecerdasan buatan pada benda mati.
- 1972: 8008 Microprocessor
Pada tahun 1972 munculah microprocessor 8008 yang berkekuatan 2 kali lipat dari
pendahulunya yaitu 4004.
- 1974: 8080 Microprocessor
Menjadi otak dari sebuah komputer yang bernama Altair, pada saat itu terjual
sekitar sepuluh ribu dalam 1 bulan
- 1978: 8086-8088 Microprocessor
Sebuah penjualan penting dalam divisi komputer terjadi pada produk untuk
komputer pribadi buatan IBM yang memakai prosesor 8088 yang berhasil
mendongkrak nama intel.
- 1982: 286 Microprocessor
Intel 286 atau yang lebih dikenal dengan nama 80286 adalah sebuah processor
yang pertama kali dapat mengenali dan menggunakan software yang digunakan untuk
processor sebelumnya.
- 1985: Intel386™ Microprocessor
Intel 386 adalah sebuah prosesor yang memiliki 275.000 transistor yang tertanam
diprosessor tersebut yang jika dibandingkan dengan 4004 memiliki 100 kali lipat
lebih banyak dibandingkan dengan 4004
- 1989: Intel486™ DX CPU Microprocessor
Processor yang pertama kali memudahkan berbagai aplikasi yang tadinya harus
mengetikkan command-command menjadi hanya sebuah klik saja, dan mempunyai
fungsi komplek matematika sehingga memperkecil beban kerja pada processor.
- 1993: Intel® Pentium® Processor
Processor generasi baru yang mampu menangani berbagai jenis data seperti suara,
bunyi, tulisan tangan, dan foto.
- 1995: Intel® Pentium® Pro Processor
Processor yang dirancang untuk digunakan pada aplikasi server dan workstation, yang dibuat untuk memproses data secara
cepat, processor ini mempunyai 5,5 jt transistor yang tertanam.
- 1997: Intel® Pentium® II Processor
Processor Pentium II merupakan processor yang menggabungkan Intel MMX yang
dirancang secara khusus untuk mengolah data video,
audio, dan grafik secara efisien. Terdapat 7.5 juta transistor terintegrasi di
dalamnya sehingga dengan processor ini pengguna PC dapat mengolah berbagai data
dan menggunakan internet dengan lebih baik.
- 1998: Intel® Pentium II Xeon® Processor
Processor yang dibuat untuk kebutuhan pada aplikasi server. Intel saat itu
ingin memenuhi strateginya yang ingin memberikan sebuah processor unik untuk
sebuah pasar tertentu.
- 1999: Intel® Celeron® Processor
Processor Intel Celeron merupakan processor yang dikeluarkan sebagai processor
yang ditujukan untuk pengguna yang tidak terlalu membutuhkan kinerja processor
yang lebih cepat bagi pengguna yang ingin membangun sebuah system computer
dengan budget (harga) yang tidak terlalu besar. Processor Intel Celeron ini
memiliki bentuk dan formfactor yang sama dengan processor Intel jenis Pentium,
tetapi hanya dengan instruksi-instruksi yang lebih sedikit, L2 cache-nya lebih
kecil, kecepatan (clock speed) yang lebih lambat, dan harga yang lebih murah
daripada processor Intel jenis Pentium. Dengan keluarnya processor Celeron ini
maka Intel kembali memberikan sebuah processor untuk sebuah pasaran tertentu.
- 1999: Intel® Pentium® III Processor
Processor Pentium III merupakan processor yang diberi tambahan 70 instruksi baru
yang secara dramatis memperkaya kemampuan pencitraan tingkat tinggi, tiga
dimensi, audio streaming, dan aplikasi-aplikasi video serta pengenalan suara.
- 1999: Intel® Pentium® III Xeon® Processor
Intel kembali merambah pasaran server dan workstation dengan mengeluarkan seri
Xeon tetapi jenis Pentium III yang mempunyai 70 perintah SIMD. Keunggulan
processor ini adalah ia dapat mempercepat pengolahan informasi dari system bus
ke processor , yang juga mendongkrak performa secara signifikan. Processor ini
juga dirancang untuk dipadukan dengan processor lain yang sejenis.
- 2000: Intel® Pentium® 4 Processor
Processor Pentium IV merupakan produk Intel yang kecepatan prosesnya mampu
menembus kecepatan hingga 3.06 GHz. Pertama kali keluar processor ini
berkecepatan 1.5GHz dengan formafactor pin 423, setelah itu intel merubah
formfactor processor Intel Pentium 4 menjadi pin 478 yang dimulai dari
processor Intel Pentium 4 berkecepatan 1.3 GHz sampai yang terbaru yang saat
ini mampu menembus kecepatannya hingga 3.4 GHz.
- 2001: Intel® Xeon® Processor
Processor Intel Pentium 4 Xeon merupakan processor Intel Pentium 4 yang
ditujukan khusus untuk berperan sebagai computer server. Processor ini memiliki
jumlah pin lebih banyak dari processor Intel Pentium 4 serta dengan memory L2
cache yang lebih besar pula.
- 2001: Intel® Itanium® Processor
Itanium adalah processor pertama berbasis 64 bit yang ditujukan bagi pemakain
pada server dan workstation serta pemakai tertentu. Processor ini sudah dibuat
dengan struktur yang benar-benar berbeda dari sebelumnya yang didasarkan pada
desain dan teknologi Intel’s Explicitly Parallel Instruction Computing ( EPIC
).
- 2002: Intel® Itanium® 2 Processor
Itanium 2 adalah generasi kedua dari keluarga Itanium
- 2003: Intel® Pentium® M Processor
Chipset 855, dan Intel® PRO/WIRELESS 2100 adalah komponen dari Intel®
Centrino™. Intel Centrino dibuat untuk memenuhi kebutuhan pasar akan keberadaan
sebuah komputer yang mudah dibawa kemana-mana.
- 2004: Intel Pentium M 735/745/755 processors
Dilengkapi dengan chipset 855 dengan fitur baru 2Mb L2 Cache 400MHz system bus
dan kecocokan dengan soket processor dengan seri-seri Pentium M sebelumnya.
- 2004: Intel E7520/E7320 Chipsets
7320/7520 dapat digunakan untuk dual processor dengan konfigurasi 800MHz FSB,
DDR2 400 memory, and PCI Express peripheral interfaces.
- 2005: Intel Pentium 4 Extreme Edition 3.73GHz
Sebuah processor yang ditujukan untuk pasar pengguna komputer yang menginginkan
sesuatu yang lebih dari komputernya, processor ini menggunakan konfigurasi
3.73GHz frequency, 1.066GHz FSB, EM64T, 2MB L2 cache, dan HyperThreading.
- 2005: Intel Pentium D 820/830/840
Processor berbasis 64 bit dan disebut dual core karena menggunakan 2 buah inti,
dengan konfigurasi 1MB L2 cache pada tiap core, 800MHz FSB, dan bisa beroperasi
pada frekuensi 2.8GHz, 3.0GHz, dan 3.2GHz. Pada processor jenis ini juga
disertakan dukungan HyperThreading.
- 2006: Intel Core 2 Quad Q6600
Processor untuk type desktop dan digunakan pada orang yang ingin kekuatan lebih
dari komputer yang ia miliki memiliki 2 buah core dengan konfigurasi 2.4GHz
dengan 8MB L2 cache (sampai dengan 4MB yang dapat diakses tiap core ), 1.06GHz
Front-side bus, dan thermal design power ( TDP )
- 2006: Intel Quad-core Xeon X3210/X3220
Processor yang digunakan untuk tipe server dan memiliki 2 buah core dengan
masing-masing memiliki konfigurasi 2.13 dan 2.4GHz, berturut-turut , dengan 8MB
L2 cache ( dapat mencapai 4MB yang diakses untuk tiap core ), 1.06GHz
Front-side bus, dan thermal design power (TDP)
DASAR PEMOGRAMAN ASSEMBLY MENGGUNAKAN SOFTWARE READ51 PADA SISTEM MICROPROSESOR ATMEL AT89S51
 Mikrokontroler adalah
sebuah chip yang dapat melakukan pemrosesan data secara digital serta
pengontrolan rangkaian elektronik sesuai dengan perintah bahasa assembly yang diberikan
pada IC tersebut. Perbedaan antara mikroprosesor dan mikrokontroler yaitu
mikroprosesor merup CPU tanpa memori dan I/O pendukung sebuah komputer,
sedangkan mikrokontroler terdiri dari CPU, memori, I/O dan unit pendukung lain
spt ADC yang terintregrasi didalamnya. Penggunaan mikrokontroler menjadi tren
pada desain teknologi elektronika, karena chip ini dapat mereduksi sistem
digital diskrit dengan perangkat lunak yang diprogram dan disisipkan dalam chip
tersebut. Mikroprosesor dikembangkan kearah perangkat berbasis komputer
sedangkan mikrokontroler lebih banyak ke sistem instrumentasi elektronik.
Mikrokontroler adalah
sebuah chip yang dapat melakukan pemrosesan data secara digital serta
pengontrolan rangkaian elektronik sesuai dengan perintah bahasa assembly yang diberikan
pada IC tersebut. Perbedaan antara mikroprosesor dan mikrokontroler yaitu
mikroprosesor merup CPU tanpa memori dan I/O pendukung sebuah komputer,
sedangkan mikrokontroler terdiri dari CPU, memori, I/O dan unit pendukung lain
spt ADC yang terintregrasi didalamnya. Penggunaan mikrokontroler menjadi tren
pada desain teknologi elektronika, karena chip ini dapat mereduksi sistem
digital diskrit dengan perangkat lunak yang diprogram dan disisipkan dalam chip
tersebut. Mikroprosesor dikembangkan kearah perangkat berbasis komputer
sedangkan mikrokontroler lebih banyak ke sistem instrumentasi elektronik.
Pemrograman
Bahasa Assembly untuk IC AT89S51
Untuk
berinteraksi dengan perangkat keras yang meliputi memberi perintah maupun
pengaturan perangkat dapat digunakan suatu bahasa pemrograman dasar tingkat
rendah yaitu bahasa pemrograman Assembly. Assembly merupakan bahasa dasar
mesin, meskipun saat ini telah banyak bahasa pemrograman tingkat tinggi yang
lebih sederhana dan mudah dipahami namun semua bahasa tersebut sesungguhnya
juga merupakan pengembangan dari bahasa assembly. Agar kita dapat menguasai
lebih mendalam akan interaksi antara user (manusia) dengan mesin maka pada
kuliah microprosesor dan microkontroler di gunakan bahasa assembly sebagai
bahasa pemrograman sistem microkontroler. Struktur dasar dari bahasa assembly
terdiri atas :
Label –
Mnemonic (OPcode) – Operand 1 – Operand 2 – Komentar
misalnya,
mulai : mov P0,#13 ; pengisian data 13
Keterangan :
- Label, Kode yang ditentukan
sendiri oleh pemrogram. jika lebih dari 2 kata, harus digabung (tidak
boleh dipisah) diakhiri dengan tanda ( : )
contoh, mulai : panjangbola : - Mnemonic (opcode), kode perintah
yang akan melakukan aksi tiap operand
contoh, mov sjmp - Operand 1 (operand
tujuan/target), data yang akan diproses oleh Mnemonic
contoh, P0 A - Operand 2 (operand asal), data
yang akan dipindahkan ke operand tujuan
contoh, #13 #110001010B - Komentar, dapat ditulis dengan
menggunakan tanda ( ; ) dan tidak akan dieksekusi oleh hardware.
Contoh, ; ————————— INI ADALAH PROGRAM LED ————–
Instruksi –
instruksi Mnemonic yang sering digunakan pada sistem microkontroler diantaranya
adalah sebagai berikut :
- Intruksi pemindahan data ( MOV )
instruksi (MOV) digunakan untuk memindahkan data dari satu tempat ke tempat lain, atau juga digunakan untuk memindahkan data dari satu pin microcontroler ke pin yang lain. Contoh : mov P3, #11001100B
keterangan :
instruksi diatas digunakan untuk memindahkan data biner 11001100 ke port 3 pada sistem microcontroler. - Instruksi lompatan
ada beberapa macam instruksi lompatan diantaranya :
SJMP (Short Jump), melompat ke alamat / label untuk alamat kode yang pendek.
AJMP (Absolut Jump), sama dengan SJMP hanya jarak lompatannya lebih jauh.
ACALL, Instruksi memanggil subrutin ke sebuah label/sub program.
RET (Return), digunakan untuk menghentikan subrutin dan melanjutkan ke instruksi berikutnya. - Instruksi operasi bit
SETB (Set Bit), digunakan untuk mengisi alamat bit dengan nilai 1
contoh, SETB P0.0 ; bit P0.0 diisi dengan nilai 1
CLR (Clear), Mengosongkan / mengubah alamat bit dengan nilai 0
contoh, CLR P0.0 ; bit P0.0 dikosongkan dengan nilai 0 - Instruksi lompatan bersyarat
CJNE (Compare and Jump if Not Equal)
Membandingkan nilai sebuah register dengan suatu data/register lain dan akan melompat ke alamat/label yang dituju jika belum sama nilainya.
Contoh, CJNE R0,#100,mulai JB (Jump if Bit Set)
Melakukan lompatan menurut isi (nilai) sebuah bit. Yang di cari adalah nilai “1″ pada bit yang diamati nilainya. Jika bit bernilai “0″ akan melanjutkan instruksi berikutnya, namun jika bit bernilai “1″ akan melompat ke alamat yang ditentukan.
Contoh, mulai : JB P0.0, eksekusi SJMP mulai JNB (Jump if Not Bit Set)
Kebalikan dari JB, yang dicari adalah nilai NOL (0) pada bit yang dialamati.
DJNZ (Decrement and Jump if Not Zero)
Mengurangi nilai sebuah register /alamat tertentu dengan nilai 1 dan jika hasilnya sudah NOL (0) maka instruksi selanjutnya akan dijalankan
contoh DJNZ R4, mulai - Instruksi aritmatika
INC (Increment)
menambahkan “1″ angka dari register/data yang dituju dan hasilnya disimpan pada register tersebut.
Contoh INC A ADD
Menambahkan isi Akumulator dengan sebuah nilai dan hasilnya disimpan kembali akumulator tersebut.
DEC (Decrement)
Mengurangi “1″ angka dari register yang dituju dan hasilnya disimpan pada register tersebut. - Instruksi geser
RR (Rotate Right), Menggeser ke kanan perbit isi akumulator
RL (Rotate Left), Menggeser ke kiri perbit isi akumulator
Software
Read51
Software
Read51 merupakan salah satu software editor bahasa pemrograman assembly. Dengan
menggunakan software ini kita dapat merancang dan membuat pemrograman assembly,
C, dll. Pada percobaan yang dilakukan dalam kuliah ini, kita menggunakan Read51
untuk merancang program menggunakan bahasa assembly dimana file program
disimpan dalam ekstensi .ASM. Adapun software read51 seperti ditampilkan pada
gambar berikut :

Read51 terdiri
dari 3 komponen utama yaitu : Jendela Editor (sisi kiri, sebagai tempat dimana
kita membuat dan merancang bahasa pemrograman assembly), Jendela Output
(terdapat output berupa tampilan LED, berada di sisi kanan) serta jendela build
(di sisi bawah, sebagai coment yang menunjukan proses dari software).
1.Memulai
membuat file baru
Untuk memulai membuat program ikuti langkah berikut :
Klik menu “File”;
pilih “New File” seperti pada gambar :
Untuk memulai membuat program ikuti langkah berikut :
Klik menu “File”;
pilih “New File” seperti pada gambar :

setelah
dipilih maka akan muncul gambar berikut

Kemudian pilih
“Assembly File”, lalu klik tombol “OK”:
Maka akan muncul jendela text editor di sisi kiri, setelah itu kita tinggal menuliskan bahasa pemrograman assembly sesuai rancangan kita.
Maka akan muncul jendela text editor di sisi kiri, setelah itu kita tinggal menuliskan bahasa pemrograman assembly sesuai rancangan kita.
2.Menyimpan program
Setelah kita membuat halaman editor, langkah selanjutnya adalah menyimpan program kita terlebih dahulu sebelum membuat pemrograman. Kenapa kita harus menyimpan dulu baru kemudian membuat pemrograman? Tidak lain adalah untuk berjaga – jaga agar nantinya jika suatu saat terjadi kerusakan komputer atau tiba-tiba listrik padam data kita telah aman terlebih dahulu. Tips ringan bagi anda disarankan anda menyimpan program anda secara berjangka misalnya setiap 5 menit agar apa yang telah kita ketikkan tidak sia-sia nantinya ketika terjadi kerusakan komputer atau lainnya. Lalu bagaimana cara menyimpan pemrograman kita? Ikutilah langkah berikut :
Langkah pertama klik menu “File”;
Pilih “Save As”; maka akan muncul gambar berikut :
Setelah kita membuat halaman editor, langkah selanjutnya adalah menyimpan program kita terlebih dahulu sebelum membuat pemrograman. Kenapa kita harus menyimpan dulu baru kemudian membuat pemrograman? Tidak lain adalah untuk berjaga – jaga agar nantinya jika suatu saat terjadi kerusakan komputer atau tiba-tiba listrik padam data kita telah aman terlebih dahulu. Tips ringan bagi anda disarankan anda menyimpan program anda secara berjangka misalnya setiap 5 menit agar apa yang telah kita ketikkan tidak sia-sia nantinya ketika terjadi kerusakan komputer atau lainnya. Lalu bagaimana cara menyimpan pemrograman kita? Ikutilah langkah berikut :
Langkah pertama klik menu “File”;
Pilih “Save As”; maka akan muncul gambar berikut :
ketikkan nama
file yang anda kehendaki pada form “File Name”, kemudian pilih direktori dimana
anda ingin menyimpan file tersebut.
Setelah itu tekan tombol “Save”;
Sekarang file anda telah tersimpan dan silahkan membuat program anda.
Setelah itu tekan tombol “Save”;
Sekarang file anda telah tersimpan dan silahkan membuat program anda.

3.Mengcompile dan Mengconvert file HEX
Setelah anda membuat program yang anda inginkan langkah selanjutnya adalah mengkompile dan mengconvert file program anda ke dalam bentu file berekstensi .HEX . Untuk melakukan ini anda tidak perlu bersusah payah karena Read 51 akan menjalankan prosedure Conver HEX ketika anda mengkompile program anda.
Prosedur Compile penting untuk dilakukan karena prosedur compile merupakan prosedur untuk mengechek program yang anda buat apakah terjadi kesalahan atau tidak. Jika terjadi kesalahan silahkan anda memperbaiki kesalahan tersebut. Sedangkan jika berhasil, maka anda dapat mensimulasikan program anda. Cara mengcompile cukup dengan menekan tombol compile (bergambar palu/ IDE mode / F2) seperti digambarkan dibawah ini
Setelah anda membuat program yang anda inginkan langkah selanjutnya adalah mengkompile dan mengconvert file program anda ke dalam bentu file berekstensi .HEX . Untuk melakukan ini anda tidak perlu bersusah payah karena Read 51 akan menjalankan prosedure Conver HEX ketika anda mengkompile program anda.
Prosedur Compile penting untuk dilakukan karena prosedur compile merupakan prosedur untuk mengechek program yang anda buat apakah terjadi kesalahan atau tidak. Jika terjadi kesalahan silahkan anda memperbaiki kesalahan tersebut. Sedangkan jika berhasil, maka anda dapat mensimulasikan program anda. Cara mengcompile cukup dengan menekan tombol compile (bergambar palu/ IDE mode / F2) seperti digambarkan dibawah ini

Prosedur
Convert HEX merupakan prosedur dimana mengkonversi program yang telah anda buat
yang sebelumnya disimpan dalam ekstensi .ASM untuk di konversi ke dalam bentuk
file berekstensi HEX. File yang berekstensi HEX inilah yang nantinya akan di
upload ke sistem microkontroler yaitu di masukkan ke IC AT89S51 pada sistem
minimum.
3.Running Program
Setelah anda mengcompile program anda, selanjutnya adalah menjalankan program yang anda buat yaitu dengan cara mengklik tombol bergambar tanda seru “!” seperti pada gambar berikut:

Setelah dijalankan maka dapat anda lihat hasilnya pada output program yang telah disediakan, tampak seperti pada gambar berikut.

Dicopy dari : http://cci-amikom.forumid.net/t141-mikroprosesor-tugas-ti-11-d-egi-rizki-gumilar-11112583#245
--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
TRAFFIC LIGHT 2 MODE MENGGUNAKAN MIKROPROSESOR Z-80 (8 BIT PORT A)
MPF-1 adalah sebuah sistem mikroprosesor yang memnpunyai piranti masukan
dan keluaran yang komponen utamanya adalah mikroprosesor Z-80. piranti
ini berguna untuk menghubungkan antara MPF-1 dengan peralatan luar.
Sinyal keluaran dari piranti ini berua sinyal digital yang hanya
mengenal kondisi 1 atau 0 (tinggi atau rendah). Untuk dapat
mengendalikan traffic light diperlukan rangkaian penghubung antara MPF-1
dengan tarffic light yang disebut rangkain interface. Rangkaian
interface berguna untuk mengaktifkan bit-bit yang diperlukan oleh
traffic light. MPF-1 disini diginakan untuk mengendalikan terffic light
pada simpang empat hanya dengan 8 bit.
Kata kunci: Pengendalikan traffic light pada simpang empat, mengurangi kecelakaan
Munculnya teknologi komputer sebenarnya berawal dari kebutuhan akan
suatu alat yang dapat dijalankan secara otomatis, memiliki kemampuan
untuk mengerjakan hal yang diinginkan. Perkembangan teknologi
semikondoktor dengan diawali penemuan transistor, telah membawa pada
kemajuan teknologi elektronika sampai saat ini.
Seperti halnya mikroprosesor memegang peranan penting untuk kelancaran
proses produksi pada dunia industri. Pengendalin (controler) dengan
menggunakan sistem mikroprosesor dijalankan secara otomatis sesuai
dengan program yang telah dibuat dalam sistem mikroprosesor tersebut.
Kegunaan lain dari sistem mikroprosesor salah satunya sebagai alat
pengendali lampu lalu lintas.
Yang dimaksud dengan rangkaian interface adalah rangkaian penghubung
antara perangkat intruksi sistem mikroprosesor MPF-1 dengan lampu-lampu
pada traffic light. Rangkaian interface didalam sistem pengendalian
traffic light tersebut, berperan agar
traffic light bekerja dengan 2 mode penyalaan, sedangkan rangakian
interface merupakan paduan dari rangkain logika, saklar tansisitor
(driver lampu) dan pensaklaran relay. Begitu pula dengan pengaturan lalu
liuntas yang bertujuan untuk meningkatkan kapasitas perempatan jalan
agar mengurangi angka frekuensi kecelakaan.
Pengaturan traffic light
Berdasarkan undang-undang lalu lintas dan angkutan darat tahun 1992
pasal 1 perihal lalu lintas bahwa yang dimaksud dengan lalu lintas
adalah gerak kendaraan, orang, dan hewan dijalan dan pasal 4 perihal
perlengkapan jalan bahwa untuk keselamatan, keamanan, ketertiban dan
kelancaran lalu lintas serta kemudahan pemakai jalan wajib dilengkapi
dengan alat pemberi isyarat lalu lintas. Alat pemberi isyarat lalu
lintas yang dimaksud adalah peralatan teknis berupa isyarat lampu yang
dapat dilengkapi dengan bunyi untuk memberi peringatan atau mengatur
lalu lintas orang dan kendaraan di persimpangan, persilangan sebidang
ataupun pada ruas jalan.
Pola persimpangan empat
Salah satu cara yang paling efektif untuk meningkatkan kapasitas danh
efisiensi lalu lintas adalah mengadakan jalan persimpangan karena bila
jalan satu arah tidak dapat menampung kendaraan yang menggunakan ruas
jalan berlainan yang memungkinkan pengguna jalan untuk menuju tempat
yang berlainan arah apalagi pengguna jalan seiring dengan waktu akan
terus bertambah. Maka dengan mengadakan jalan persimpangan, waktu
perjalanan sering kali dapatr dipersingkat, arus lalu lintas akan dapat
ditingkatkan, dan dampak tambahan lain adalah bahwa kecelakaan dapat
berkurang.


Gambar:Titik konflik simpang empat
Ditinjau dari titik konflik kecelakaan maka persimpangan empat memiliki
pola tersendiri. untuk melihat potensi terjadinya kecelakaan, kita harus
melihat arus lalu lintas yang terjadi dipersimpangan-persimpangan
dimana arus lalu lintas memotong arus lalu lintas lainnya disinilah
tempat kemungkinan terjadi kecelakaan titik potong arus lalu lintas itu
disebut titik konflik.
Sistem Kontrol Automatik
Tujuan sistem kontrol
Hasil
Sistem
kontrol umpan balik adalah sistem yang mempertahankan hubungan yang
ditentukan antara keluaran dan beberapa acuan masukan dengan
membandingkan mereka dan dengan menggunakan perbedaan sebagai alat
kontrol
Sitem
pengaturan otomatis adalah sitem kontrol umpan balik dengan acuan
masukan atau keluaran yang dikehendaki dapat konstan atau berubah secara
perlahan dengan berjalannya waktu dan tugas utamanya adlah menjaga
keluaran sebenarnya berada pada nilai yangb dikehendaki dengan adanya
gangguan. Dalam istilah yang lebih teknis tujuan dapat dihubungkan erat
dengan masukan atau sinyal penggerak dan hasilnya diserbut keluaran atau
variabel yang dikendalikan. Secara umum tujuan sistem kontrol adalah
untuk mengendalikan keluaran dengan berbagai masukan tertentu melalui
unsur-unsur sistem kontrol.
Sistem
kontrol loop tertutup sering disebut sistem kontrol umpan balik sebab
keluaran dari sistem ini mempunyai pengaruh terhadap aksi kontrol untuk
mengurangi kesalahan sistem.
Sistem
kontrol loop terbuka adalah suatu sistem yang keluarannya tidak
mempunyai pengaruh terhadap aksi kontrol dan keluarannya tidak dapat
digunakan sebagai perbandingan umpan balik dengan masukan.
Sitem Mikroprosesor MPF-1
Sitem
mikroprosesor MPF-1 adalah merupakan sisem mikroprosesor dimana
piranti-pirantinya dirangkai dalam suatu unit terpadu dalam papan
rangkaian tercetak (PCB) dengan komponen utama sebuah mikroprosesor
Z-80. MPF-1 memiliki konfigurasi unit-unit komponen, ini merupakan
sebuah konfigurasi standar dari mikroprosesor MPF-1. konfigurasi MPF-1
terdiri atas:
- pengolah mikro (mikroprosesor/CPU). Jenis yang digunakan adalah zilog-80
- Piranti memori yang terdiri dari RAM (random acces memori) dan ROM (Read only memori) yang memiliki 8 data dan 16 bit alamat.
-
Piranti masukan dan keluaran (input/ output) yang berfungsi sebagai
peng-hubung antara CPU dengan piranti luar - jalur data (data Bus),
jalur alamat
- jalur data (data bus) jalur alamat (adress Bus) dan jalur kendali (control bus).
Sebuah
sistem standar mikroprosesor MPF-1 seluruh proses pertunjukan alamat
yang akan memilih perngkat mana yang akan diaktifkan, dilakukan oleh
mikroprosesor Z-80 melalui jalur kendali. Jalur alamat berfungsi membawa
alamat yang umumnya berasal dari suatu register yang bernama program
counter atau alamat dari program sendiri. Jalur data berfungsi untuk
membawa data. Misalnya dari prosesor, dari memori, dan dari perangkat
I/O
Mikroprosesor Z-80
Seperti
telah disebutkan sebelumnya, mikroprosesor merupakan jantung pada
sistem mikroprosesor yang sering disebut sebagai unit pemproses pusat
(Centaral procesing unit). Unit pemproses pusat (CPU) Z-80 merupakan
sebuah mikroprosesor yang dibuat dalam serpih rangkaian trepadu dengan
jumlah penyemat 40 buah.
CPU
Z-80 memiliki kemampuan dalam perhitungan aritmatika dan logika,
sekumpulan register mekanisme untuk mengambil intruksi dari memori,
mekanisme untuk membuka sandi intruksi dan mekanisme untuk menghasilkan
isyarat-isyarat kendali sebagai pelaksanaan suatu intruksi.
Register-register dalam CPU
Jumlah register yang terdapat di dalam CPU Z-80 terdiri dari 12 buah register 8 bit dan 4 buah register 16 bit.
Menurut
fungsinya, register-register berfungsi untuk menampung intruksi daj
data yang diambil oleh CPU. Register tesebut tergolong dari 3 bagian.
- Register serba guna (general purpose registers) terdiri atas dua perangkat register masing-masing 6 buah register 8 bit.
- Register perangkat khusus (special purpose registers)
- akumulator dan register bendera (flag)
Akumulator
adalah register 8 bit yang merupakan sarana untuk melaksanakan semua
pemanipulasian data. Hanya data yang berada di akumulator yang dapat
diolah oleh CPU dan sebaliknya data hanya dapat dibaca ke dalam memori
melalui akumulator.
Unit Aritmatika dan logika (ALU)
Intruksi
ilmu hitung dan logika 8 bit dari CPU dilaksanakan dalam ALU, misalnya
operasi penjumlahan, pengurangan, perbandingan AND, OR, NOT. Hal
tersebut dikirim ke akumulator unruk disimpan. Macam-macam intruksi yang
dapat dilaksanakan oleh ALU antara lain.
- Penjumlahan dan pengurangan
- Logika AND, OR, dan EX-OR
- Membandingkan
- Set atau reset bit
- Penambahan dengan satu
- Pengurangan dengan satu
Teknik pengalamatan CPU Z-80
Pengalamatan
adalah cara menyatakan operand dan alamat operand di dalam suatu
intruksi. Sebagian intruksi dari Z-80 berhubungan dengan proses
penyimpanan data ke dalam register-register dari CPU, memori luar atau
gerbang masukan/keluaran. Agar intruksi-intruksi tersebut menggunakan
tempat memori dan waktu yang sedikit mungkin, maka dibentuklah beberapa
teknik pengalaman.
Dalam pengoperasian CPU Z-80 dikenal beberapa macam pengalamatan yaitu :
a. pengalamatan seketika (ammediate addresing)
Pengalamatan
seketika ini data yang sebenarnya merupakan bagian dari intruksi itu
sendiri. Artinya data yang bereada dibelakang kode operasi bukan
merupakan alamat operand tetapi merupakan data yang sebenarnya. Modus
pengalamatan seketika antara lain digunakan untuk :
Memasukan data kesalah satu register CPU
Melaksanakan operand aritmatika dan logika dengan menggunakan isi akumulator dan data seketika 8 bit.
b. pengalamatan relative (Relative Addressing)
intruksi
yang termasuk jenis ini mempunyai panjang dua byte pertama merupakan
kode operasinya sedangkan byte yang kedua merupakan suatu nilai
perpindahan dari alamat lokasi memori yang lain nilai perpindahan ini
ditulis dalam bentuk komplemen dua yang bertanda dn ditamkan pada alamat
kode operasi dari intruksi berikutnya.
c. pengalamatan implisit (Implied Addressing)
teknik
pengalamatan ini digunakan dalam operasi dimana satu atau lebih alamat
operand telah terselip didalm kode operasi dari intruksinya. Misalnya
dalam operasi aritmatika dan logika, dimana akumulator sebagai tempat
penyimpanan salah satu oprand dan hasil dari salah satu operasi.
d. pengalamatan langsung (Direct Addresing)
pada pengalamatan ini operasi dilaksakan antar register-register dsalam CPU.
e. pengalamtan tidak langsung (Indirect Addressing)
suatu pasangan register CPU digunakan sebagai petunjuk suatu lokasi memori dimana operand akan disimpan atau dikeluarkan.
ROM (Read Only Memory)
Rom
adalah memori yang hanya dapat dibaca saja dalm penulisan atau
pengisian sebuah ROM dilakukan oleh pabrik karena memerlukan peralatan
khusus. Secara umum dalam praktek sebuah ROM yang berisikan sekumpulan
data dan intruksi hanya dapat dibaca dan tidak dapat dirubah. Terdapat
tiga jenis ROM yaitu:
ROM
yang dapat kita program sendiri tetapi setelah diprogram, tidak diubah
lagi tanpa melakukan penghapusan. Penghapusan dapat dilakukan dengan
menggunakan cahaya ultra ungu. ROM jenis ini disebut EPROM (Erasable
PROM).
ROM yang hanya dapat diprogram tetapi tidak dapat diubah kembali. ROM jenis ini disebut PROM (Programeble ROM)
ROM yang sudah statis oleh pabrik
RAM (Random Acces Memory)
RAM
adalah sebuah perangkat memori yang dapat dibaca dan ditulis. RAM
digunakan untuk menyimpan yang sifatnya sementara. Terdapat dua jenis
RAM yaitu RAM statis dan dinamis. RAM dinamis walaupun tedapat daya
listrik data yang terdapat didalamnya akan tetap akan hilang sebab
disimpan oleh kapasitas transistor FET. RAM dinamis harus disegarkan
setiap sepersribu detik. Karenanya imembutuhkan rangkaian pengendali
yang begitu rumit. RAM statis tidak memerlukan penyegaran karena dat
yang disimpan dalam flip-flop akan terus bertahan selama terdapat daya
listrik.
Pada
MPF-1 RAM yang digunakan adalah RAM statis dengan kapasitas 2 kbyte.
Alamat yang digunakan adalah 1800 H sampai dengan 1FFF H. Sedengkan RAM
dinamis tidak digunakan karena pada MPF-1 tidak mamliki rangkaian
penyegaran untuk RAM tersebut.
Memori Mapping
Dari
uraian diatas maka dibuat mapping memori atau pemetaan memori juga
menyediakan almat memori cadangan yang dapat diisi oleh RAM statis jenis
6116 (4 kbyte) atau ROM jenis 2716 (2 kbyte) dengan alamat 2000 H
sampai dengan 2FFF.
Piranti Masukan-Keluaran (I/O)
Selain
mikroprosesor selain mampu memproses seluruh iontruksi9 dan data dalam
lingkup sendiri, mikro0prosesor dilemngkapi dengan peralatan yang mampu
menghubungkan dengan dunia luar. Piranti ini disebut I/O. Pada MPF-1
memiliki dua buah piranti I/O yang memiliki fungsi yang berlainan,
yaitu:
programable peripheral interface (PPI) 8355.
Programable paralel Input/output (PIO) Z-80
Memory
Memori
adalah sebuahn piranti yang sangat penting karena memori merupakan
piranti yang mampu menyimpan program-program yang akan diproses oleh
mokroprosesor. Memori menyimpanj dalam bentuk bit, bilangan biner yang
membentuk harga numeric (data) alamat ataupun intruksi-intruksi
komputer. Sebuah memoroi dalam komputer dapat berbentuk dalam berbagai
macam media misalnya: dalam bentuk pita magnetik, floppy disc, hard
disc. Memori yang sangat penting adalh ROM dan RAM yang dibangun dalam
bentuk sebuah CHIP.
PPI 8255
PPI
8255 adalah suatu komponen LSI (large scale integration) dengan 40
penyemat dalam keadaan DIP (dual in line) yang berfungsi untuk
melaksanakan hubungan luar antara mikroprosesor dengan komponen lain.
Pada MPF-1, PPI 8255 berfungsi melakukan hubungan antara mikroprosesor
dengan keyboard, tampilan seven segmen, penggerak speaker dan penggerak
LED. PPI 8255 memiliki pintu kelua masuk melalui 24 penyemat yang
terbagi menjadi 3 bagian yaitu:
Gebang
A terdiri dari 8 penyemat (PA0-PA5) digunakan sebagai keyboard, (PA6)
sebagai user key dan (PB0-PB7) sebagai kendali tape dalm membaca data.
Gerbang B terdiri dari 8 penyemat (PB0-PB7) digunakan untuk tampilan sevent segmen.
Gerbang
C terdiri dari 8 penyemat (PC7) digunakan untuk mengirim data ke tape,
LED dan kendali speaker. (PC6) sebagai monitor break kontrol dan
(PC0-PC5) sebagai tombol dan peraga.
PPI 8255 memiliki beberapa modus kerja yang terdiri dari modus 0, modus 1, dan modus 2.
Modus 0 : dalam modus 0 ini gerbang A,B,C atas gerbang masing-masing dapat dibuat menjadi masukan atau keluaran.
Modus
1 : dalam modus ini gerbang A dan B dapat dibuat sebagai masukan atau
keluaran, sedangkan gerbang C sebagai pengendali. Garbang C atas
melayani gerbang A dan gerbang C bawah melayani gerbang B.
Modus
2 : pada modus ini gerbang A digunakan sebagai data biderictional
artinya dapat sebagai masukan atau keluaran sekaligus pada jalur yang
saman gerbang B sama dengan kondisi pada modus 0 dan modus 1.
Flowchart program
Flowchart
adalah suatu skema yang menggambarkan urutan kegiatan suatu program
dari aeal sampai akhir. Fungsi dari flowchart ini yaitu untuk memudahkan
pembaca logika pemecahan masalah atau persoalan yang akan diprogram.
Sedangkan program adalah urutan perintah yang ditulis menggunakan bahasa
pemrograman yang sesuai
Kesimpulan
Salah
satu penyebab kemacetan lalu lintas adalah traffic light yang terdapat
pada persimpangan jalan. Hal ini tidak terlepas dari penyalaan lampu
pada traffic light yang cenderung tidak berubah padahal tingkat
kepadatan arus lalu lintas setiap waktu dan tiap-tiap ruas jalan pada
jalan raya berbeda.
Pemanfaatan
sistem mikroprosesor MPF-1 yang komponen utamanya adalh mikroprosesor
Z-80 merupakan salah satu alternatif untuk dijadikan pengendali traffic
light 2 mode penyalaan. Untuk mengendalikan traffic light tersebut
diperlukan rangkaian interface yang dirangkai dari komponen-komponen
seperti IC 7402, transistor C 828, relayb DPDT serta komponen pendukung
lainnya dan untuk mengaktifkan darin alat ini digunakan bahasa
pemrograman bahasa machine.
Daftar pustaka
Cahyono, Berlianto B.2003. model Traffic Lightpenyeberangan Dengan Tampilan Waktu. Jakarta: FT UN.
Chattopadhyay, D. 1988. Dasar Elektronika. Jakarta: UI-Press
Coffron, W. James. 1982. Z-80 Aplication. USA: Sybex Inc
Fitzgerald, A.E. 1995. Dasar Elektronika Jilid 2. jakarta: Erlangga.
Kuo, Benyamin C. 1988. Teknik Kontrol Automatik. Jakarta: Prenhallindo.
Sutrisno. 1986. Elektronika II. Jakarta: Karunia Jakarta.
Ogata, Katsuhito. 1996. Teknik kontrol Automatik. Jilid 1. Jakarta: Erlangga.
Warpani, Suwardjoko. 1988. Rekayasa Lalu Lintas. Jakarta.
Wasito S. 1986. Elektronika Dalam Industri. Jakarta: Karya Utama.
sourc : http://siyyapaahayyouu89.blogspot.com/2010/01/jurnal.html
http://subur-ade.blogspot.com/2014/01/traffic-light-2-mode-menggunakan.html
------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Seven segment adalah sebuah piranti penampil untuk menampilkan angka
desimal. Penampil seven segment banyak digunakan dalam jam digital,
meter elektronik, dan piranti elektronik yang lain.
Seven segment adalah diode LED
sebanyak 7 buah yang disusun dan dikemas membentuk penampil angka, dan
biasanya ditambahkan 1 buah LED untuk koma (Dot Point). Karena dibentuk
dari kumpulan LED maka ada dua jenis seven segment, yaitu Common Anode
(CA) dan Common Catode (CC).

Dari gambar diatas sudah terlihat perbedaannya. Jika common cathoda, dimana sisi katoda pada LED tiap segmennya digabungkan (common) sehingga sering disebut katoda bersama. Sedangkan jika common anoda, pada sisi anodapada LED tiap segmennya digabungkan sehingga sering disebut katoda bersama.
Antara CC (common cathoda) dan CA (common anoda) mempunyai perbedaan yang mendasar yaitu cara untuk mengaktifkan/menyalakan tiap segmennya.
Untuk penyalakan seven segment jenis CC maka masukan segment a s/d Dp harus diberi logika tinggi dan bagian CC dihubungkan dengan Ground. Sedangkan jika ingin menyalakan seven segment jenis CA maka masukan segment a s/d Dp harus diberi logika LOW dan CA harus dihubungkan ke +5 VCC.
Skema Rangkaian
P1 sbg input PA sebagai output

ALAMAT PENTING MODUL DT-51 adalah sebagai berikut:
1. PA (port A) = 2000h
2. PB (port B) = 2001h
3. PC (port C) = 2002h
4. Reg CW (Control Word) = 2003h
5. DIGIT1 = 80h
6. DIGIT2 = 40h
Dari gambar rangkaian di atas saluran data tampilan angka menggunakan P1 yang dipakai bersama antara digit1 dan digit 2 sehingga jika ingin menampilkan angka bersama (tampil 2 digit sekaligus) dilakukan secara bergantian secara cepat sehingga tampil seolah-olah bersamaan.
Catatan penting untuk tampilan secara bergatian dari digit 1 ke digit 2 harus diselingi dengan mematikan semua sesaat, karena jika tidak dimatikan sesaat maka tampilan angka akan tumpang tindih.
Tabel Kode untuk angka 0-9
Digit
|
gfedcba
|
abcdefg
|
a
|
b
|
c
|
d
|
e
|
f
|
g
|
0
|
0x3F
|
0x7E
|
on
|
on
|
on
|
on
|
on
|
on
|
off
|
1
|
0x06
|
0x30
|
off
|
on
|
on
|
off
|
off
|
off
|
off
|
2
|
0x5B
|
0x6D
|
on
|
on
|
off
|
on
|
on
|
off
|
on
|
3
|
0x4F
|
0x79
|
on
|
on
|
on
|
on
|
off
|
off
|
on
|
4
|
0x66
|
0x33
|
off
|
on
|
on
|
off
|
off
|
on
|
on
|
5
|
0x6D
|
0x5B
|
on
|
off
|
on
|
on
|
off
|
on
|
on
|
6
|
0x7D
|
0x5F
|
on
|
off
|
on
|
on
|
on
|
on
|
on
|
7
|
0x07
|
0x70
|
on
|
on
|
on
|
off
|
off
|
off
|
off
|
8
|
0x7F
|
0x7F
|
on
|
on
|
on
|
on
|
on
|
on
|
on
|
9
|
0x6F
|
0x7B
|
on
|
on
|
on
|
on
|
off
|
on
|
on
|
Contoh pemanfaatan seven segment:
$mod51
CSEG
ORG 4000H
LJMP START
ORG 4100H
START: MOV A, #80H
MOV DPTR, #2003H
MOVX @DPTR, A
BACA: MOV P1, #1101101B //menggunakan bilangan biner
MOV A, #80H
MOV DPTR, #2002H
MOVX @DPTR, A
SJMP BACA
END
Hasil:

Dicopy dari : http://performance-arch.blogspot.com/2014/01/seven-segment-dt-51.html
---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------


0 komentar:
Posting Komentar